Usar o Sensor IMU
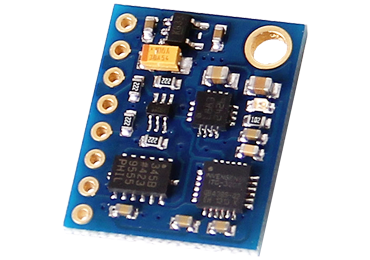
Esta pequena placa inclui três sensores: o ITG3205, o ADXL345 e o HMC5883L respetivamente o giroscópio, acelerómetro e magnetómetro todos eles apenas com três eixos para realizar os cálculos necessários.
O magnetómetro deteta os campos magnéticos, o acelerómetro medidas de aceleração física, por exemplo as forças G e o giroscópio mede a velocidade angular/rotação. Todos os valores lidos pelos sensores podem ser combinados para calcular a orientação, posição e velocidade no espaço tridimensional.
Existem placas de sensores IMU que incluem um sensor barométrico que permite ler valores da pressão atmosférica, mas, não é o caso especifico desta placa IMU pois apenas possui três sensores. Poderá verificar um sensor barométricos simples, como por exemplo o BMP180 ou o BMP280.
Guia de montagem
Use as instruções a seguir para ligar o sensor de UV.
Vídeo de montagem
Visualise o vídeo Missão 1 Tutorial: Sensor UV e acompanhe a montagem do sensor UV.
Diagrama de montagem
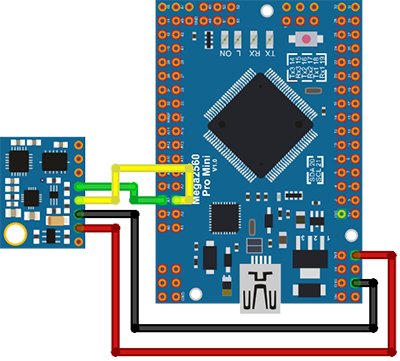


Instruções de montagem
1. Fio Verde: Ligar o pino SDA no sensor IMU ao pino de A4 do Arduino Pro Mini.
2. Fio Amarelo: Ligar o pino SCL do sensor IMU ao pino A5 do Arduino Pro Mini.
3. Fio Preto: Ligar o pino GND do sensor IMU ao pino GND do Arduino Pro Mini.
4. Fio Vermelho: Ligar o pino dos 3.3V do sensor IMU ao 3.3V do Arduino Pro Mini.
Código para o Sensor IMU
O código que se segue é o código mínimo necessário para ligar o sensor IMU à plataforma de experiências LUSOSAT.
/***************************************************
* Sensor IMU ITG3205, ADXL345, HMC5883
***************************************************
* Este exemplo lê a quantidade de luminosidade do sensor IMU
* Criado em 07/09/2016
* Por Mesquita
****************************************************/
/******************Informações**********************
* 1.Ligar o Sensor de luminosidade aos pinos A4 e A5 do Arduino
http://www.lusosat.org/images/luminosidadeTSL2561.png
* 2.Código testado com o Arduino UNO, Nano, Mega e Mega Pro Mini
****************************************************/
#include<Wire.h>
const int MPU_addr=0x68; // Endereço I2C do sensor
int16_t AcX,AcY,AcZ,Tmp,GyX,GyY,GyZ;
void setup(){
Wire.begin();
Wire.beginTransmission(MPU_addr);
Wire.write(0x6B); // Registo PWR_MGMT_1
Wire.write(0); // acorda o sensor
Wire.endTransmission(true);
Serial.begin(9600);
}
void loop(){
Wire.beginTransmission(MPU_addr);
Wire.write(0x3B); // inicia com o endereço 0x3B (ACCEL_XOUT_H)
Wire.endTransmission(false);
Wire.requestFrom(MPU_addr,14,true); // solicita um total de 14 registos
AcX=Wire.read()<<8|Wire.read(); // 0x3B (ACCEL_XOUT_H) & 0x3C (ACCEL_XOUT_L)
AcY=Wire.read()<<8|Wire.read(); // 0x3D (ACCEL_YOUT_H) & 0x3E (ACCEL_YOUT_L)
AcZ=Wire.read()<<8|Wire.read(); // 0x3F (ACCEL_ZOUT_H) & 0x40 (ACCEL_ZOUT_L)
Tmp=Wire.read()<<8|Wire.read(); // 0x41 (TEMP_OUT_H) & 0x42 (TEMP_OUT_L)
GyX=Wire.read()<<8|Wire.read(); // 0x43 (GYRO_XOUT_H) & 0x44 (GYRO_XOUT_L)
GyY=Wire.read()<<8|Wire.read(); // 0x45 (GYRO_YOUT_H) & 0x46 (GYRO_YOUT_L)
GyZ=Wire.read()<<8|Wire.read(); // 0x47 (GYRO_ZOUT_H) & 0x48 (GYRO_ZOUT_L)
Serial.print("AcX = "); Serial.print(AcX);
Serial.print(" | AcY = "); Serial.print(AcY);
Serial.print(" | AcZ = "); Serial.print(AcZ);
Serial.print(" | Tmp = "); Serial.print(Tmp/340.00+36.53); //equação da temperatura em graus
Serial.print(" | GyX = "); Serial.print(GyX);
Serial.print(" | GyY = "); Serial.print(GyY);
Serial.print(" | GyZ = "); Serial.println(GyZ);
delay(333);
}
Usos para o sensor IMU
Terra
- Determinação da velocidade
- Determinação de direção
- Sistemas de guia/navegação
- Registo de movimento
Espaço
- Determinação de direção
-Sistemas de guia/navegação
Experiências
- Aceleração de objetos
- Velocidade media de objetos
- Sistema de guia do foguetão
Recursos Adicionais
- Esquemas
- datasheet (ITG-3200)
- datasheet (ADXL345)
- GitHub